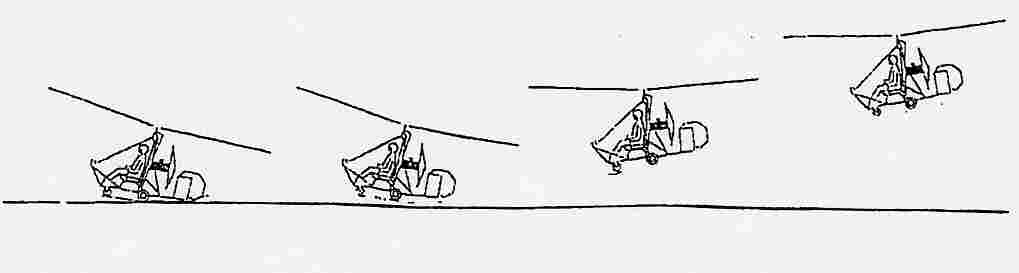
La procedura di avvicinamento normale si discosta ben poco
da quella di avvicinamento senza potenza, infatti si effettua con un regime
di giri motore, relativamente basso.
Una volta individuato il punto ci possibile contatto con la pista dovrete
fare in modo di perdere la quota che avete mantenuto durante lo stesso.
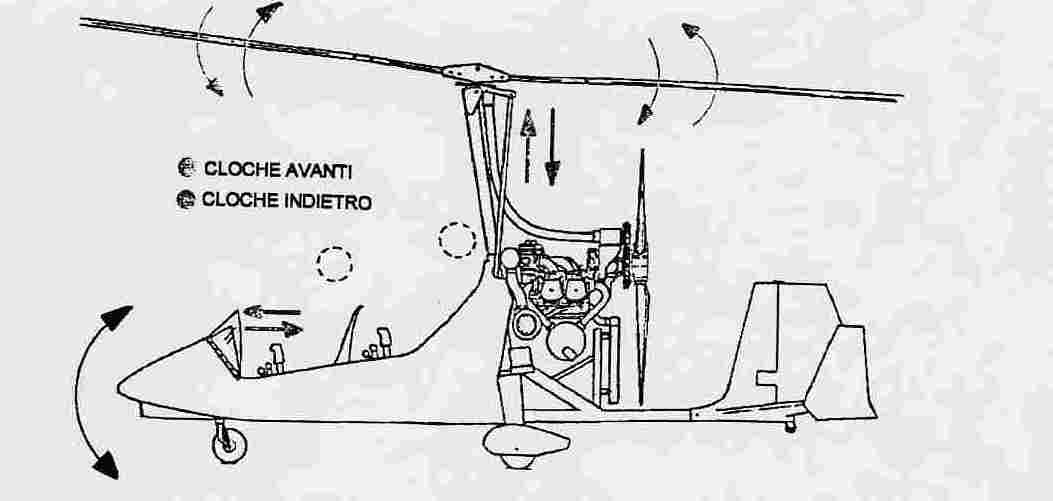
Per prima cosa si renderà necessaria la riduzione della potenza, seguita
da una lieve pressione della barra di comando in avanti, per ottenere un dolce
rateo di discesa.
Durante la discesa la velocità non deve essere inferiore alle 45 mph
(72 km/h).
Impostata e mantenuta la velocità e l’assetto, si procederà,
effettuando una richiamata graduale fino al contatto del carrello principale
con il suolo, accompagnato dalla riduzione della manetta.
L’atterraggio ideale, avviene toccando il suolo con le ruote del carrello
principale e mai con quello anteriore.
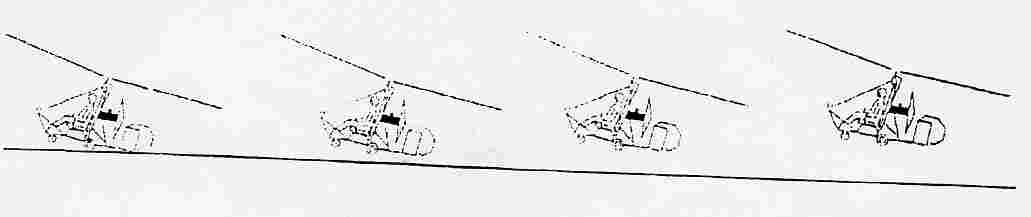
Questo tipo di avvicinamento è caratterizzato da un
rateo di discesa molto ridotto, in conseguenza del quale, necessiterà
la continua assistenza del motore ed un approccio a bassa quota. A differenza
dell’avvicinamento normale, l’autogiro si presenterà con un assetto
piatto o leggermente a cabrare che, permetterà una maggiore precisione
nel decidere il punto di contatto col terreno.
L’avvicinamento piatto, può essere effettuato con velocità inferiori
a 45 mph (72 km/h)ma con enorme riduzioni del margine di sicurezza.
E riconducibile all’avviamento normale con l’unica differenza che si dovrà
operare esclusivamente sull’assetto.
Questo tipo di avvicinamento è vivamente consigliato per acquisire
una sempre maggiore confidenza con il mezzo nelle condizioni di avaria motore.
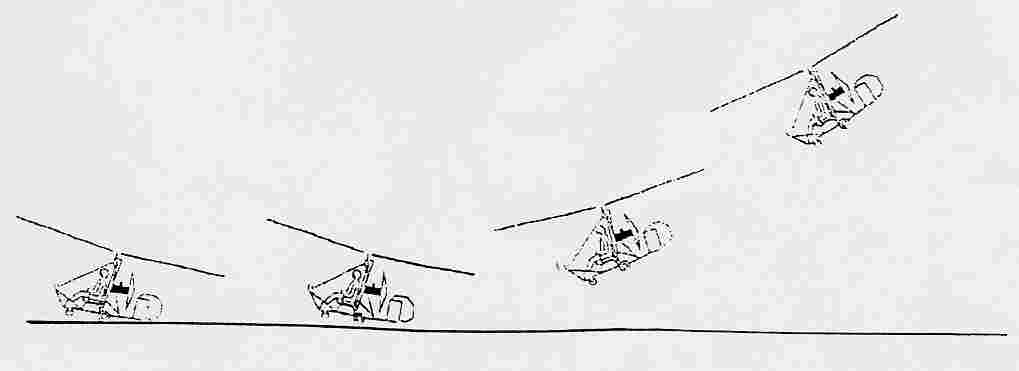
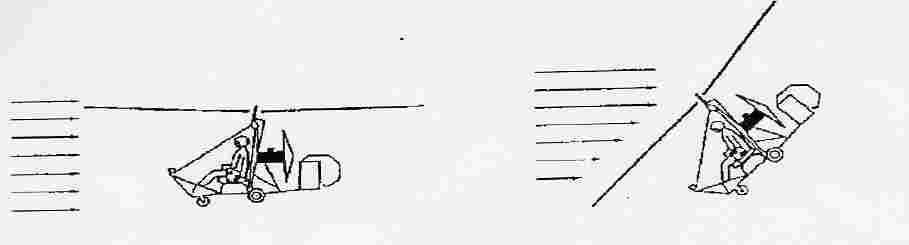
Avvicinamento ripido
E applicabile solo in casi di estrema necessità. L’avvicinamento
ripido permette di atterrare in piste corte con la presenza di alti ostacoli
sulla soglia delle stesse.
La procedura prevede di operare ad una velocità notevole inferiore
alle 45 mph (72 km/h).
Per prevenire elevati rischi, dovuti al particolare assetto precluso dal
tipo di avvicinamento, è consigliabile livellare per acquisire un
minimo di velocità utile per la richiamata finale.

Atterraggio con vento
E sempre raccomandato atterrare contro vento. Visti i ridottissimi
spazi di atterraggio, se il vento è forte, a maggior ragione bisogna
mantenere il vento in prua, a costo di atterrare di traverso sulla pista.
Se dovete atterrare con vento in coda, effettuare un avvicinamento piatto
riducendo al minimo la “flare” finale.
Ricordatevi che tirando indietro la barra offrirete al vento una maggior
superficie del disco rotore, e quindi avrete un maggior decremento delle
prestazioni aerodinamiche con conseguente atterraggio pesante.
Atterraggio fuori campo
Nel caso si abbia la necessita di compiere un atterraggio
fuori campo si deve innanzitutto effettuare una ricognizione alta al fine
di scoprire eventuali ostacoli che si possono incontrare nella fase di atterraggio,
compresi quelli presenti sul campo d’atterraggio(es. fossi, pietre ect);
successivamente si deve effettuare un avvicinamento con riattaccata per
verificare più da vicino le caratteristiche del fondo, a cui seguirà
l’atterraggio con avvicinamento “assistito”(per maggiori informazioni vedere
punto 2.2 della seguente guida), questo al fine di trovarsi in una condizione
migliore nel caso sia necessario effettuare una riattaccata improvvisa.
Rullaggio e parcheggio
Vale quello che è stato detto per il pre-decollo,
ma con una considerazione in più, al rientro siete soddisfatti e
rilassati per il volo appena fatto. Attenzione: sopra di voi c’è
ancora un rotore che sta “volando” a centinaia di km/h, anche se state parcheggiando.
Non abbandonate mai il vostro mezzo con il motore in movimento.
PERICOLI LEGATI ALL’USO DELL’AUTOGIRO
In questa sezione si tratteranno i pericoli riguardanti l’uso dell’autogiro,
che sono rappresentati dal fenomeno del “delfinaggio” e dalla “condizione
di flusso d’aria invertito”.
Delfinaggio
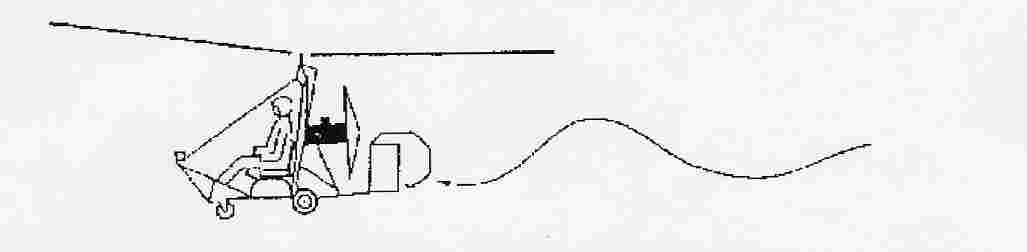
Il delfinaggio consiste in una serie di oscillazioni dall’alto
in basso di intensità sempre maggiore, che può far sì
che il rotore colpisca l’elica o la coda e che, se non fermato in tempo,
porta alla caduta del velivolo. Questo fenomeno si è ridotto in maniera
considerevole nel tempo grazie alla presenza di generose superfici di coda
orizzontali.
Il delfinaggio può essere indotto in due modi:
Oscillazione indotta dal pilota(PIO): è causta da un’eccessiva escursione
sui comandi; rispetto ad un aeroplano, le cui ali e superfici di controllo
sono rigidamente attaccate ad esso, le strutture dei velivoli a rotore stanno
appese liberamente al rotore per mezzo di un perno. C’è perciò
un ritardo di tempo tra l’istante in cui il pilota applica il movimento
del comando ed il momento in cui il comando stesso si “attua”; il pilota
deve imparare ad anticipare questo ritardo per evitare di intervenire erroneamente
aumentando il movimento che lo stesso cerca di fermare. Questa oscillazione
è tipica nei piloti-studenti, poiché con l’esperienza si impara
ad anticipare i movimenti del velivolo.
Oscillazione indotta dal velivolo(AIO): è causata da un velivolo
instabile, per una progettazione errata o per la mancanza di stabilizzatori
orizzontali, o per un velivolo fuori bilanciamento o erroneamente caricato.
Questa oscillazione, con i velivoli odierni, è sempre più
rara.
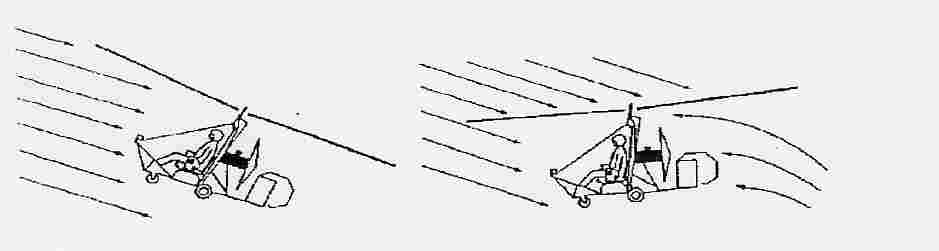
Condizione di flusso d’aria invertito
La condizione di flusso d’aria invertito può essere causata da una
manovra con G negativo; questo è indotto solamente da un pilota che
applica una riattaccata repentina: per livellarsi dopo la salita, invece
di ridurre la potenza si spinge la barra in avanti (magari per far colpo
su eventuali spettatori). Così il rotore, che ha bisogno di un carico
costante di G postivi (flusso d’aria dal basso), si ritrova senza di essi,
ma con G negativi, che fanno sì che quest’ultimo perda così
tanta portanza che può iniziare a sbattere se si guadagna ancora
velocità (per avere un’idea del fenomeno è come lo sbattimento
a terra che i principianti incontrano cercando di decollare con una velocità
rotore insufficiente). Bisogna perdere almeno il 20% della velocità
rotore perché una manovra con G negativi diventi pericolosa.
Comunque la maggiore parte degli incidenti dopo una manovra di questo tipo
si hanno comunque non a causa dello sbattimento delle pale rotore, ma perché
il velivolo si viene a trovare in una “Condizione di flusso d’aria invertito”.
Ciò può essere causato sia spingendo il muso in basso dopo
una salita rapida, sia spingendo il muso in basso improvvisamente durante
i voli con velocità molto alte.